Geodesics in Kerr spacetime¶
Geodesics of Kerr spacetime are implemented via the class KerrGeodesic.
- class kerrgeodesic_gw.kerr_geodesic.KerrGeodesic(parent, initial_point, pt0=None, pr0=None, pth0=None, pph0=None, mu=None, E=None, L=None, Q=None, r_increase=True, th_increase=True, chart=None, name=None, latex_name=None, a_num=None, m_num=None, verbose=False)¶
Bases:
sage.manifolds.differentiable.integrated_curve.IntegratedGeodesicGeodesic of Kerr spacetime.
Geodesics are computed by solving the geodesic equation via the generic SageMath geodesic integrator.
INPUT:
parent– IntegratedGeodesicSet, the set of curves \(\mathrm{Hom_{geodesic}}(I, M)\) to which the geodesic belongsinitial_point– point of Kerr spacetime from which the geodesic is to be integratedpt0– (default:None) Boyer-Lindquist component \(p^t\) of the initial 4-momentum vectorpr0– (default:None) Boyer-Lindquist component \(p^r\) of the initial 4-momentum vectorpth0– (default:None) Boyer-Lindquist component \(p^\theta\) of the initial 4-momentum vectorpph0– (default:None) Boyer-Lindquist component \(p^\phi\) of the initial 4-momentum vectormu– (default:None) mass \(\mu\) of the particleE– (default:None) conserved energy \(E\) of the particleL– (default:None) conserved angular momemtum \(L\) of the particleQ– (default:None) Carter constant \(Q\) of the particler_increase– (default:True) boolean; ifTrue, the initial value of \(p^r=\mathrm{d}r/\mathrm{d}\lambda\) determined from the integral of motions is positive or zero, otherwise, \(p^r\) is negativeth_increase– (default:True) boolean; ifTrue, the initial value of \(p^\theta=\mathrm{d}\theta/\mathrm{d}\lambda\) determined from the integral of motions is positive or zero, otherwise, \(p^\theta\) is negativechart– (default:None) chart on the spacetime manifold in terms of which the geodesic equations are expressed; ifNonethe default chart (Boyer-Lindquist coordinates) is assumedname– (default:None) string; symbol given to the geodesiclatex_name– (default:None) string; LaTeX symbol to denote the geodesic; if none is provided,namewill be useda_num– (default:None) numerical value of the Kerr spin parameter \(a\) (required for a numerical integration)m_num– (default:None) numerical value of the Kerr mass parameter \(m\) (required for a numerical integration)verbose– (default:False) boolean; determines whether some information is printed during the construction of the geodesic
EXAMPLES:
We construct first the Kerr spacetime:
sage: from kerrgeodesic_gw import KerrBH sage: a = var('a') sage: M = KerrBH(a); M Kerr spacetime M sage: BLchart = M.boyer_lindquist_coordinates(); BLchart Chart (M, (t, r, th, ph))
We pick an initial spacetime point for the geodesic:
sage: init_point = M((0, 6, pi/2, 0), name='P')
A geodesic is constructed by providing the range of the affine parameter, the initial point and either (i) the Boyer-Lindquist components \((p^t_0, p^r_0, p^\theta_0, p^\phi_0)\) of the initial 4-momentum vector \(p_0 = \left. \frac{\mathrm{d}x}{\mathrm{d}\lambda}\right| _{\lambda=0}\), (ii) the four integral of motions \((\mu, E, L, Q)\) or (iii) some of the components of \(p_0\) along with with some integrals of motion. We shall also specify some numerical value for the Kerr spin parameter \(a\). Examples of (i) and (iii) are provided below. Here, we choose \(\lambda\in[0, 300m]\), the option (ii) and \(a=0.998 m\), where \(m\) in the black hole mass:
sage: geod = M.geodesic([0, 300], init_point, mu=1, E=0.883, ....: L=1.982, Q=0.467, a_num=0.998) sage: geod Geodesic of the Kerr spacetime M
The numerical integration of the geodesic equation is performed via
integrate(), by providing the step in \(\delta\lambda\) in units of \(m\):sage: geod.integrate(step=0.005)
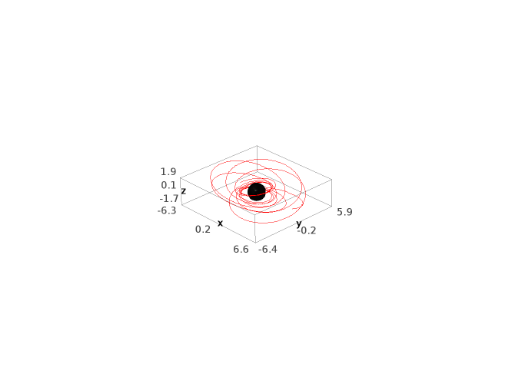
We can then plot the geodesic:
sage: geod.plot() Graphics3d Object
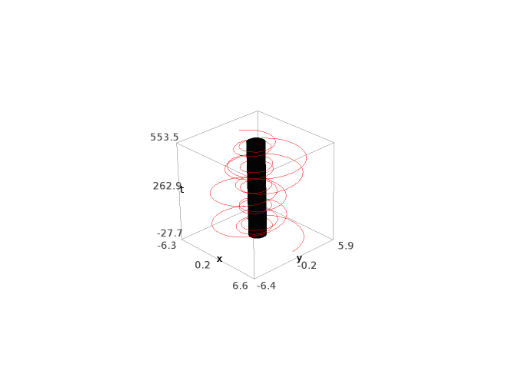
Actually, many options can be passed to
plot(). For instance to a get a 3D spacetime diagram:sage: geod.plot(coordinates='txy') Graphics3d Object
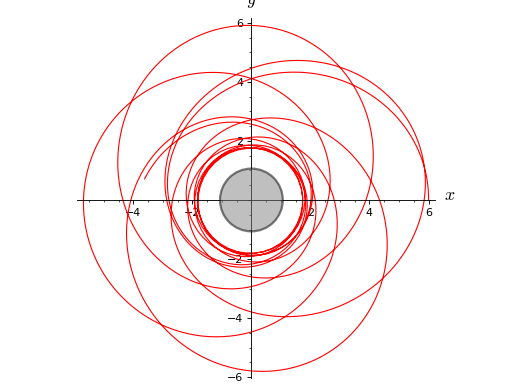
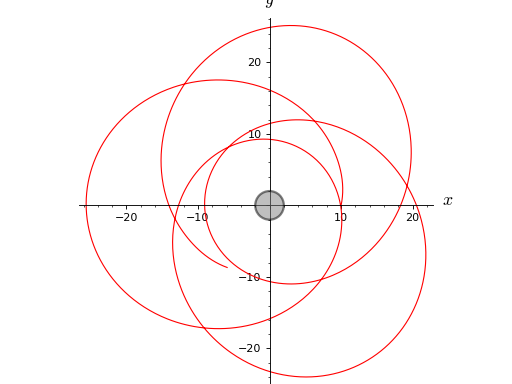
or to get the trace of the geodesic in the \((x,y)\) plane:
sage: geod.plot(coordinates='xy', plot_points=2000) Graphics object consisting of 2 graphics primitives
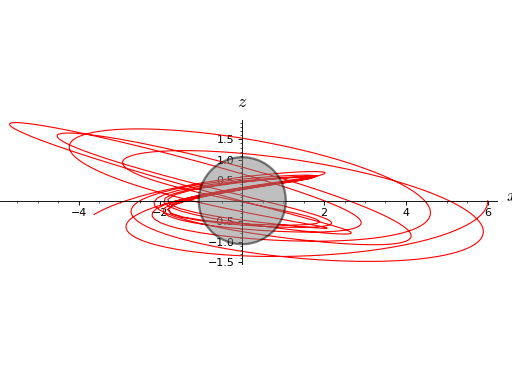
or else to get the trace in the \((x,z)\) plane:
sage: geod.plot(coordinates='xz') Graphics object consisting of 2 graphics primitives
As a curve, the geodesic is a map from an interval of \(\mathbb{R}\) to the spacetime \(M\):
sage: geod.display() (0, 300) → M sage: geod.domain() Real interval (0, 300) sage: geod.codomain() Kerr spacetime M
It maps values of \(\lambda\) to spacetime points:
sage: geod(0) Point on the Kerr spacetime M sage: geod(0).coordinates() # coordinates in the default chart # tol 1.0e-13 (0.0, 6.0, 1.5707963267948966, 0.0) sage: BLchart(geod(0)) # equivalent to above # tol 1.0e-13 (0.0, 6.0, 1.5707963267948966, 0.0) sage: geod(300).coordinates() # tol 1.0e-13 (553.4637326813786, 3.703552505462962, 1.6613834863942039, 84.62814710987239)
The initial 4-momentum vector \(p_0\) is returned by the method
initial_tangent_vector():sage: p0 = geod.initial_tangent_vector(); p0 Tangent vector p at Point P on the Kerr spacetime M sage: p0 in M.tangent_space(init_point) True sage: p0.display() # tol 1.0e-13 p = 1.29225788954106 ∂/∂t + 0.00438084990626460 ∂/∂r + 0.0189826106258554 ∂/∂th + 0.0646134478134985 ∂/∂ph sage: p0[:] # tol 1.0e-13 [1.29225788954106, 0.00438084990626460, 0.0189826106258554, 0.0646134478134985]
For instance, the components \(p^t_0\) and \(p^\phi_0\) are recovered by:
sage: p0[0], p0[3] # tol 1.0e-13 (1.29225788954106, 0.0646134478134985)
Let us check that the scalar square of \(p_0\) is \(-1\), i.e. is consistent with the mass parameter \(\mu = 1\) used in the construction of the geodesic:
sage: g = M.metric() sage: g.at(init_point)(p0, p0).subs(a=0.998) # tol 1.0e-13 -1.00000000000000
The 4-momentum vector \(p\) at any value of the affine parameter \(\lambda\), e.g. \(\lambda=200m\), is obtained by:
sage: p = geod.evaluate_tangent_vector(200); p Tangent vector at Point on the Kerr spacetime M sage: p in M.tangent_space(geod(200)) True sage: p.display() # tol 1.0e-13 1.316592599498746 ∂/∂t - 0.07370434215844164 ∂/∂r - 0.01091195426423706 ∂/∂th + 0.07600209768075264 ∂/∂ph
The particle mass \(\mu\) computed at a given value of \(\lambda\) is returned by the method
evaluate_mu():sage: geod.evaluate_mu(0) # tol 1.0e-13 1.00000000000000
Of course, it should be conserved along the geodesic; actually it is, up to the numerical accuracy:
sage: geod.evaluate_mu(300) # tol 1.0e-13 1.0000117978600134
Similarly, the conserved energy \(E\), conserved angular momentum \(L\) and Carter constant \(Q\) are computed at any value of \(\lambda\) by respectively
evaluate_E(),evaluate_L()andevaluate_Q():sage: geod.evaluate_E(0) # tol 1.0e-13 0.883000000000000 sage: geod.evaluate_L(0) # tol 1.0e-13 1.98200000000000 sage: geod.evaluate_Q(0) # tol 1.0e-13 0.467000000000000
Let us check that the values of \(\mu\), \(E\), \(L\) and \(Q\) evaluated at \(\lambda=300 m\) are equal to those at \(\lambda=0\) up to the numerical accuracy of the integration scheme:
sage: geod.check_integrals_of_motion(300) # tol 1.0e-13 quantity value initial value diff. relative diff. $\mu^2$ 1.0000235958592163 1.00000000000000 0.00002360 0.00002360 $E$ 0.883067996080701 0.883000000000000 0.00006800 0.00007701 $L$ 1.98248080818931 1.98200000000000 0.0004808 0.0002426 $Q$ 0.467214137649741 0.467000000000000 0.0002141 0.0004585Decreasing the integration step leads to smaller errors:
sage: geod.integrate(step=0.001) sage: geod.check_integrals_of_motion(300) # tol 1.0e-13 quantity value initial value diff. relative diff. $\mu^2$ 1.0000047183936422 1.00000000000000 4.718e-6 4.718e-6 $E$ 0.883013604456676 0.883000000000000 0.00001360 0.00001541 $L$ 1.98209626120918 1.98200000000000 0.00009626 0.00004857 $Q$ 0.467042771975860 0.467000000000000 0.00004277 0.00009159Various ways to initialize a geodesic
Instead of providing the integral of motions, as for
geodabove, one can initialize a geodesic by providing the Boyer-Lindquist components \((p^t_0, p^r_0, p^\theta_0, p^\phi_0)\) of the initial 4-momentum vector \(p_0\). For instance:sage: p0 Tangent vector p at Point P on the Kerr spacetime M sage: p0[:] # tol 1.0e-13 [1.29225788954106, 0.00438084990626460, 0.0189826106258554, 0.0646134478134985] sage: geod2 = M.geodesic([0, 300], init_point, pt0=p0[0], pr0=p0[1], ....: pth0=p0[2], pph0=p0[3], a_num=0.998) sage: geod2.initial_tangent_vector() == p0 True
As a check, we recover the same values of \((\mu, E, L, Q)\) as those that were used to initialize
geod:sage: geod2.evaluate_mu(0) 1.00000000000000 sage: geod2.evaluate_E(0) 0.883000000000000 sage: geod2.evaluate_L(0) 1.98200000000000 sage: geod2.evaluate_Q(0) 0.467000000000000
We may also initialize a geodesic by providing the mass \(\mu\) and the three spatial components \((p^r_0, p^\theta_0, p^\phi_0)\) of the initial 4-momentum vector:
sage: geod3 = M.geodesic([0, 300], init_point, mu=1, pr0=p0[1], ....: pth0=p0[2], pph0=p0[3], a_num=0.998)
The component \(p^t_0\) is then automatically computed:
sage: geod3.initial_tangent_vector()[:] # tol 1.0e-13 [1.29225788954106, 0.00438084990626460, 0.0189826106258554, 0.0646134478134985]
and we check the identity with the initial vector of
geod, up to numerical errors:sage: (geod3.initial_tangent_vector() - p0)[:] # tol 1.0e-13 [2.22044604925031e-16, 0, 0, 0]
Another way to initialize a geodesic is to provide the conserved energy \(E\), the conserved angular momentum \(L\) and the two components \((p^r_0, p^\theta_0)\) of the initial 4-momentum vector:
sage: geod4 = M.geodesic([0, 300], init_point, E=0.8830, L=1.982, ....: pr0=p0[1], pth0=p0[2], a_num=0.998) sage: geod4.initial_tangent_vector()[:] [1.29225788954106, 0.00438084990626460, 0.0189826106258554, 0.0646134478134985]
Again, we get a geodesic equivalent to
geod:sage: (geod4.initial_tangent_vector() - p0)[:] # tol 1.0e-13 [0, 0, 0, 0]
- check_integrals_of_motion(affine_parameter, solution_key=None)¶
Check the constancy of the four integrals of motion
INPUT:
affine_parameter– value of the affine parameter \(\lambda\)solution_key– (default:None) string denoting the numerical solution to use for evaluating the various integrals of motion; ifNone, the latest solution computed byintegrate()is used.
OUTPUT:
a SageMath table with the absolute and relative differences with respect to the initial values.
- evaluate_E(affine_parameter, solution_key=None)¶
Compute the conserved energy \(E\) at a given value of the affine parameter \(\lambda\).
INPUT:
affine_parameter– value of the affine parameter \(\lambda\)solution_key– (default:None) string denoting the numerical solution to use for the evaluation; ifNone, the latest solution computed byintegrate()is used.
OUTPUT:
value of \(E\)
- evaluate_L(affine_parameter, solution_key=None)¶
Compute the conserved angular momentum about the rotation axis \(L\) at a given value of the affine parameter \(\lambda\).
INPUT:
affine_parameter– value of the affine parameter \(\lambda\)solution_key– (default:None) string denoting the numerical solution to use for the evaluation; ifNone, the latest solution computed byintegrate()is used.
OUTPUT:
value of \(L\)
- evaluate_Q(affine_parameter, solution_key=None)¶
Compute the Carter constant \(Q\) at a given value of the affine parameter \(\lambda\).
INPUT:
affine_parameter– value of the affine parameter \(\lambda\)solution_key– (default:None) string denoting the numerical solution to use for the evaluation; ifNone, the latest solution computed byintegrate()is used.
OUTPUT:
value of \(Q\)
- evaluate_mu(affine_parameter, solution_key=None)¶
Compute the mass parameter \(\mu\) at a given value of the affine parameter \(\lambda\).
INPUT:
affine_parameter– value of the affine parameter \(\lambda\)solution_key– (default:None) string denoting the numerical solution to use for the evaluation; ifNone, the latest solution computed byintegrate()is used.
OUTPUT:
value of \(\mu\)
- evaluate_mu2(affine_parameter, solution_key=None)¶
Compute the square of the mass parameter \(\mu^2\) at a given value of the affine parameter \(\lambda\).
INPUT:
affine_parameter– value of the affine parameter \(\lambda\)solution_key– (default:None) string denoting the numerical solution to use for the evaluation; ifNone, the latest solution computed byintegrate()is used.
OUTPUT:
value of \(\mu^2\)
- evaluate_tangent_vector(affine_parameter, solution_key=None)¶
Return the tangent vector (4-momentum) at a given value of the affine parameter.
INPUT:
affine_parameter– value of the affine parameter \(\lambda\)solution_key– (default:None) string denoting the numerical solution to use for the evaluation; ifNone, the latest solution computed byintegrate()is used.
OUTPUT:
instance of TangentVector representing the 4-momentum vector \(p\) at \(\lambda\)
- initial_tangent_vector()¶
Return the initial 4-momentum vector.
OUTPUT:
instance of TangentVector representing the initial 4-momentum \(p_0\)
EXAMPLES:
Initial 4-momentum vector of a null geodesic in Schwarzschild spacetime:
sage: from kerrgeodesic_gw import KerrBH sage: M = KerrBH(0) sage: BLchart = M.boyer_lindquist_coordinates() sage: init_point = M((0, 6, pi/2, 0), name='P') sage: geod = M.geodesic([0, 100], init_point, mu=0, E=1, ....: L=3, Q=0) sage: p0 = geod.initial_tangent_vector(); p0 Tangent vector p at Point P on the Schwarzschild spacetime M sage: p0.display() p = 3/2 ∂/∂t + 1/6*sqrt(30) ∂/∂r + 1/12 ∂/∂ph
- integrate(step=None, method='odeint', solution_key=None, parameters_values=None, verbose=False, **control_param)¶
Solve numerically the geodesic equation.
INPUT:
step– (default:None) step \(\delta\lambda\) for the integration, where \(\lambda\) is the affine parameter along the geodesic; default value is a hundredth of the range of \(\lambda\) declared when constructing the geodesicmethod– (default:'odeint') numerical scheme to use for the integration; available algorithms are:'odeint'- makes use of scipy.integrate.odeint via Sage solverdesolve_odeint();odeintinvokes the LSODA algorithm of the ODEPACK suite, which automatically selects between implicit Adams method (for non-stiff problems) and a method based on backward differentiation formulas (BDF) (for stiff problems).'rk4_maxima'- 4th order classical Runge-Kutta, which makes use of Maxima’s dynamics package via Sage solverdesolve_system_rk4()(quite slow)'dopri5'- Dormand-Prince Runge-Kutta of order (4)5 provided by scipy.integrate.ode'dop853'- Dormand-Prince Runge-Kutta of order 8(5,3) provided by scipy.integrate.ode
and those provided by
GSLvia Sage classode_solver:'rk2'- embedded Runge-Kutta (2,3)'rk4'- 4th order classical Runge-Kutta'rkf45'- Runge-Kutta-Felhberg (4,5)'rkck'- embedded Runge-Kutta-Cash-Karp (4,5)'rk8pd'- Runge-Kutta Prince-Dormand (8,9)'rk2imp'- implicit 2nd order Runge-Kutta at Gaussian points'rk4imp'- implicit 4th order Runge-Kutta at Gaussian points'gear1'- \(M=1\) implicit Gear'gear2'- \(M=2\) implicit Gear'bsimp'- implicit Bulirsch-Stoer (requires Jacobian)
solution_key– (default:None) string to tag the numerical solution; ifNone, the stringmethodis used.parameters_values– (default:None) list of numerical values of the parameters present in the system defining the geodesic, to be substituted in the equations before integrationverbose– (default:False) prints information about the computation in progress**control_param– extra control parameters to be passed to the chosen solver
EXAMPLES:
Bound timelike geodesic in Schwarzschild spacetime:
sage: from kerrgeodesic_gw import KerrBH sage: M = KerrBH(0) sage: BLchart = M.boyer_lindquist_coordinates() sage: init_point = M((0, 10, pi/2, 0), name='P') sage: lmax = 1500. sage: geod = M.geodesic([0, lmax], init_point, mu=1, E=0.973, ....: L=4.2, Q=0) sage: geod.integrate() sage: geod.plot(coordinates='xy') Graphics object consisting of 2 graphics primitives
With the default integration step, the accuracy is not very good:
sage: geod.check_integrals_of_motion(lmax) # tol 1.0e-13 quantity value initial value diff. relative diff. $\mu^2$ 1.000761704316941 1.00000000000000 0.0007617 0.0007617 $E$ 0.9645485805304451 0.973000000000000 -0.008451 -0.008686 $L$ 3.8897905637080923 4.20000000000000 -0.3102 -0.07386 $Q$ 5.673017835722329e-32 0 5.673e-32 -Let us improve it by specifying a smaller integration step:
sage: geod.integrate(step=0.1) sage: geod.check_integrals_of_motion(lmax) # tol 1.0e-13 quantity value initial value diff. relative diff. $\mu^2$ 1.0000101879128696 1.00000000000000 0.00001019 0.00001019 $E$ 0.9729448260004574 0.973000000000000 -0.00005517 -0.00005671 $L$ 4.197973829219027 4.20000000000000 -0.002026 -0.0004824 $Q$ 6.607560764960032e-32 0 6.608e-32 -We may set the parameter
solution_keyto keep track of various numerical solutions:sage: geod.integrate(step=0.1, solution_key='step_0.1') sage: geod.integrate(step=0.02, solution_key='step_0.02')
and use it in the various evaluation functions:
sage: geod.evaluate_mu(lmax, solution_key='step_0.1') # tol 1.0e-13 1.0000050939434606 sage: geod.evaluate_mu(lmax, solution_key='step_0.02') # tol 1.0e-13 1.0000010212056811
- plot(coordinates='xyz', prange=None, solution_key=None, style='-', thickness=1, plot_points=1000, color='red', include_end_point=(True, True), end_point_offset=(0.001, 0.001), verbose=False, label_axes=None, plot_horizon=True, horizon_color='black', fill_BH_region=True, BH_region_color='grey', display_tangent=False, color_tangent='blue', plot_points_tangent=10, width_tangent=1, scale=1, aspect_ratio='automatic', **kwds)¶
Plot the geodesic in terms of the coordinates \((t,x,y,z)\) deduced from the Boyer-Lindquist coordinates \((t,r,\theta,\phi)\) via the standard polar to Cartesian transformations.
INPUT:
coordinates– (default:'xyz') string indicating which of the coordinates \((t,x,y,z)\) to use for the plotprange– (default:None) range of the affine parameter \(\lambda\) for the plot; ifNone, the entire range declared during the construction of the geodesic is consideredsolution_key– (default:None) string denoting the numerical solution to use for the plot; ifNone, the latest solution computed byintegrate()is used.verbose– (default:False) determines whether information is printed about the plotting in progressplot_horizon– (default:True) determines whether the black hole event horizon is drawnhorizon_color– (default:'black') color of the event horizonfill_BH_region– (default:True) determines whether the black hole region is colored (for 2D plots only)BH_region_color– (default:'grey') color of the event horizondisplay_tangent– (default:False) determines whether some tangent vectors should also be plottedcolor_tangent– (default:blue) color of the tangent vectors when these are plottedplot_points_tangent– (default: 10) number of tangent vectors to display when these are plottedwidth_tangent– (default: 1) sets the width of the arrows representing the tangent vectorsscale– (default: 1) scale applied to the tangent vectors before displaying them
See also
DifferentiableCurve.plot for the other input parameters
OUTPUT:
either a 2D graphic oject (2 coordinates specified in the parameter
coordinates) or a 3D graphic object (3 coordinates incoordinates)